

…ΧΤΧΟϊ≥ΤΘΚ…œΚΘδΚΧο “”–œόΙΪΥΨ
ΝΣœΒ»ΥΘΚ’≈ΙΛΘ®–ΓΫψΘ©
ΝΣœΒ ÷ΜζΘΚ
ΙΧΕ®ΒγΜΑΘΚ
Τσ“Β” œδΘΚsales001@hamada.net.cn
ΝΣœΒΒΊ÷ΖΘΚ…œΚΘ –ΦΈΕ®«χΑ°ΧΊ¬Ζ877Κ≈λßΑΩΙζΦ …ΧΈώ‘ΑD¥±510 “
” ±ύΘΚ201803
ΝΣœΒΈ“ ±Θ§«κΥΒ «‘ΎΒγΉ”Ωλ ÷Άχ…œΩ¥ΒΫΒΡΘ§–Μ–ΜΘΓ
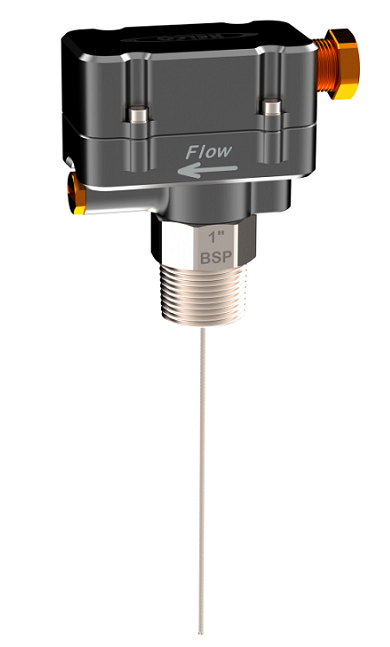
”–“Μ÷÷ ΐΉ÷ ΫΈσ≤νΦλ≤βΙΰΡ§Ρ…ΩΤΝυ÷αΜζΤς»ΥΥ≈Ζΰ¥ΪΕ·ΦθΥΌΜζCSD-25-50-2A-GRΉΑ÷ΟΓΘ’β÷÷ΉΑ÷Οάϊ”ΟΆ§≤Ϋ–≈Κ≈ ΙΈΜ÷Ο≤βΕ®œΒΆ≥≤ζ…ζΒΡΖ¥άΓ¬ω≥εΚΆΈΜ÷Ο÷ΗΝν¬ω≥εΆ§≤ΫΘ§ΥΆ»κΈσ≤νΦΡ¥φΤςΘ§‘Ύ’βάο±»ΫœΝΫ÷÷¬ω≥ε÷°ΚσΘ§άϊ”Ο ΐΉ÷ΝΩά¥Ϋ®ΝΔΈσ≤ν–≈Κ≈ΓΘ’β÷÷ ΐΉ÷ΝΩ–≈Κ≈‘Ό”Ο ΐΡΘΉΣΜΜΤςΉΣΜΜΈΣΡΘΡβΈσ≤ν–≈Κ≈Θ§ΨΆΡή÷τ÷ΤΥ≈ΖΰΒγΕ·ΜζΓΘ“ρ¥ΥΓΘΕ®
ΈΜΨΪΕ»»ΓΨω”Ύ ΐΉ÷ ΫΈΜ÷Ο≤βΕ®œΒΆ≥ΒΡ–‘ΡήΓΘ
œ÷‘Ύ –Οφœζ έΒΡΙΰΡ§Ρ…ΩΤΝυ÷αΜζΤς»ΥΥ≈Ζΰ¥ΪΕ·ΦθΥΌΜζCSD-25-50-2A-GR ΐΉ÷ ΫΈΜ÷Ο≤ύΕ®œΒΆ≥Θ§¥σ÷¬Ω…Ζ÷ΈΣ»γœ¬»ΐ÷÷ΘΚΙβΒγ ΫΘ§¥≈–‘±»άΐ≥Ώ ΫΘ§Βγ¥≈Η–”Π ΫΓΘ
Έό¬έΡΡ÷÷ΖΫ ΫΘ§ΕΦΗς”–Τδ”≈ΒψΘ§Έ“Ο«άϊ”ΟΫαΙΙ‘≠άμ»ί“ΉάμΫβΒΡΙβΒγ Ϋά¥ΥΒΟς ΐΉ÷ ΫΈΜ÷Ο≤βΕ®œΒΆ≥ΓΘΙβΒγ ΫœΏ–‘±ύ¬κΤς≤ΘΝß÷ΤΒΡ±»άΐ≥ΏΑ≤ΉΑ‘ΎΙΛΉςΧ®…œΘ§―ΊΦΐΆΖΖΫœρ“ΤΕ·ΓΘ÷± ”±»άΐ≥ΏΙΧΕ®≤ΜΕ·Θ§œύΕ‘±»άΐ≥Ώ±Θ≥÷“ΜΕ®ΒΡΦδΗτΓΘ‘Ύ≤ΘΝß±»άΐ≥ΏΚΆ÷Η Ψ±»άΐ≥Ώ…œΨυ‘»ΒΊΖ÷Μ°±ΝΟήΒΡΩΧΕ»Θ§Α―ΥϋΟ«Φ–ΉΓΘ§≈δ÷ΟΙβ‘¥ΓΔΆΗΨΒΚΆ ήΙβ‘ΣΦΰΓΘ“ρ¥ΥΘ§≤ΘΝß±»άΐ≥ΏΒΡΩΧΕ»œύΕ‘”Ύ÷Η Ψ±»άΐ≥ΏΟΩ“ΤΕ·“ΜΗωΦδΗτΨΆ÷ΊΗ¥“Μ¥ΈΟςΑΒΘ§‘ΎΙΰΡ§Ρ…ΩΤΝυ÷αΜζΤς»ΥΥ≈Ζΰ¥ΪΕ·ΦθΥΌΜζCSD-25-50-2A-GR÷Η Ψ±»άΐ≥Ώ…œ…η÷ΟΕΰΉιΩΧΕ»ΒΡΉς”ΟΘ§ «ΈΣΝΥΜώΒΟΨΏ”–90ΓψœύΈΜ≤νΒΡΝΫ÷÷’ΐœ“≤®–≈Κ≈ΓΘ
‘ΎΖ÷ΈωΑϋΚ§ΕύΗω≥ί¬÷Ε‘ΒΡ–ΐΉΣ‘ΥΕ·œΒΆ≥ ±Θ§œρ≤…”ΟΒ»–ß–ΐΉΣ‘ΥΕ·œΒΆ≥±δΜΜ «Ζ«≥Θ”––ßΒΡΓΘΒΪ «ΒγΕ·ΜζΉΣΉ”ΚΆΗΚ‘ΊΆ®≥Θ‘Ύ–ΐΉΣ‘ΥΕ·÷– ήΒΫ’≥–‘ΉηΝΠΓΘάΐ»γΘ§”…”Ύ÷α≥–≤ΩΦΰΒΡ’≥–‘ΡΠ≤ΝΚΆΈ–ΝςΥπΚΡΒ»Θ§ΒγΕ·ΜζΉΣΉ”‘Ύ–ΐΉΣΙΐ≥Χ÷– ήΒΫΉηΝΠΘ§ΗΚ‘Ί“≤¥”ΒΦΗΥ±μΟφΚΆΗς÷÷Ϋι÷ ήΒΫ’≥–‘ΉηΝΠΓΘ
-
ΚΪΙζOptoMarineΗΏ–‘Φέ±»

-
ΚΪΙζOptoMarineΦΛΙβΈΜ“Τ

-
ΚΪΙζAUTROL―ΙΝΠ±δΥΆΤς7MF

-
ΚΪΙζAUTROL―ΙΝΠ±δΥΆΤς7MF
-
AUTROL―ΙΝΠ±δΥΆΤςAPT32

-
AUTROL÷«Ρή―ΙΝΠ±δΥΆΤςAPT

-
…ΫΧΊUPSΒγ‘¥800KVA 10

-
…ΫΧΊUPSΒγ‘¥500KVA 60

-
…ΫΧΊUPSΒγ‘¥300KVA 40

-
…ΫΧΊUPSΒγ‘¥200KVA 25

-
…ΫΧΊUPSΒγ‘¥120KVA 16
-
…ΫΧΊUPSΒγ‘¥80KVA 100
-
L-RL-25B≤ύ»κ Ϋ“ΚΈΜΩΣΙΊK
-
L-H-25N≤ύ»κ Ϋ“ΚΈΜΩΣΙΊKE
-
L-H-25B-SS≤ύ»κ Ϋ“ΚΈΜΩΣ
-
ΚΪΙζOptoMarineΗΏ–‘Φέ±»
-
ΚΪΙζOptoMarineΦΛΙβΈΜ“Τ
-
ΚΪΙζAUTROL―ΙΝΠ±δΥΆΤς7MF
-
ΚΪΙζAUTROL―ΙΝΠ±δΥΆΤς7MF
-
AUTROL―ΙΝΠ±δΥΆΤςAPT32
-
AUTROL÷«Ρή―ΙΝΠ±δΥΆΤςAPT
-
…ΫΧΊUPSΒγ‘¥800KVA 10
-
…ΫΧΊUPSΒγ‘¥500KVA 60
-
…ΫΧΊUPSΒγ‘¥300KVA 40
-
…ΫΧΊUPSΒγ‘¥200KVA 25
-
…ΫΧΊUPSΒγ‘¥120KVA 16
-
…ΫΧΊUPSΒγ‘¥80KVA 100
-
L-RL-25B≤ύ»κ Ϋ“ΚΈΜΩΣΙΊK
-
L-H-25N≤ύ»κ Ϋ“ΚΈΜΩΣΙΊKE
-
L-H-25B-SS≤ύ»κ Ϋ“ΚΈΜΩΣ